Электрические схемы мостовых кранов
Электрические схемы мостовых крановЭлектрические схемы бывают принципиальные или элементные, монтажные или маркированные. Принципиальные схемы отражают взаимодействие элементов электрооборудования, указывают последовательность пппупжирния тпкя по силовым цепям и аппаратам
управления. Пользоваться принципиальными схемами удобно при ремонте и наладке. Аппаратура в них просто и четко разбита на отдельные самостоятельные цепи, и они легко запоминаются. Электрические цепи на принципиальных схемах подразделяются на силовые, изображаемые толстыми линиями, и цепи управления, выполненные тонкими линиями. На монтажных или маркированных схемах в отличие от принципиальных изображают электрическую проводку крана и взаимное расположение электрооборудования.
Электрическая защита. В качестве электрической защиты, как уже отмечалось выше, применяются защитные панели ПЗКБ-160 и ПЗКН-150. Некоторые заводы выполняют защитные панели собственной сборки. Независимо от этого каждая такая сборка представляет собой укомплектованную панель, на которой смонтированы: трехполюсный рубильник, предохранители цепи управления, трехполюсный контактор, реле максимального тока, контактные зажимы цепей управления и линейных проводов, пусковая кнопка и трансформатор цепей управления.
Рекламные предложения на основе ваших интересов:
Рассмотрим электрическую схему защитной панели ПЗКБ-160 (рис. 36). Цепь управления показана тонкими линиями, силовая цепь — жирными линиями. Пояснение схемы силовой цепи будет дано ниже. В данный момент рассмотрим схему цепи управления без элементов, расположенных правее пунктирной линии, соединяющей точки.
Из приведенной схемы видно, что подача напряжения к катушке контактора Л возможна после нажатия на кнопку KB, когда рукоятки всех контроллеров КП, КТ, КМ поставлены в нулевое положение, включен аварийный выключатель АВ, замкнуты контакт люка КЛ, контакт дверей кабины КД, включена ключ-марка КМ и замкнуты контакты максимального реле MP. После включения линейного контактора Л замыкаются его блок-контакты Л в цепи управления, шунтирующие кнопку КВ. При этом создается замкнутая цепь: провод Л1, катушка Л, контакты MP, КМ, КД, KЛ, АВ, КМ, КВМН, КВТН, КТ, КП, блок-контакт Л, провод Л2.
При выводе контроллеров из нулевого положения в рабочее цепь не размыкается, так как ток проходит не через нулевые контакты контроллеров, а через цепь с блок-контактом Л, и катушка линейного контактора запитывается по параллельной цепи.
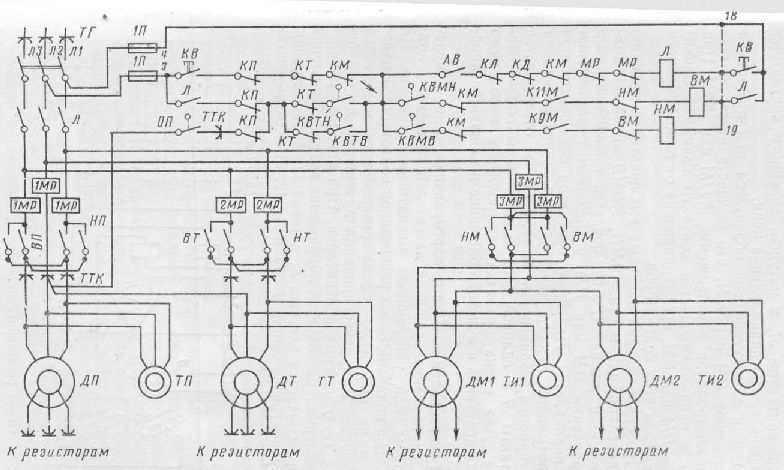
Рис. 1. Электрическая схема защиты кранов.
Вторая замкнутая цепь образуется при включении контакторов ВМ или НМ, что осуществляется контактами контроллера передвижения К11М или К9М. При этом в цепи размыкаются контакты взаимной блокировки НМ или ВМ, предохраняющие от одновременного включения этих контакторов.
При срабатывании конечных выключателей механизма передвижения моста КВМН, КВМВ линейный контактор Л не отпадает, а отключается только контактор направления ВМ или НМ и механизм передвижения останавливается. Линейный контактор отключится при срабатывании любого другого концевого выключателя или прибора безопасности. В этом случае отключаются контакты Л в силовой цепи и механизмы обесточиваются. Для пуска рукоятки контроллеров необходимо снова поставить в нулевое положение и нажать на кнопку КВ.
Реверсирование. Для реверсирования, т.е. изменения направления вращения двигателей, применяют контакторы или реверсивные магнитные пускатели. На рис. 37, а показана схема реверсивной контакторной панели, а на рис. 2 — схема реверсивного магнитного пускателя. Для реверсирования двигателей достаточно двух двухполюсных контакторов. При повороте рукоятки контроллера подается напряжение в цепь управления и включается катушка, которая замыкает верхнюю пару контактов линии 1-11 и 3-12. При этом двигатель вращается в направлении Вперед. При подаче напряжения в цепь управления, что соответствует повороту контроллера в противоположную сторону, включаются катушка Я и нижняя пара силовых контактов, замыкая линии 1-12 и 3-11. В этом случае двигатель вращается в направлении Назад.
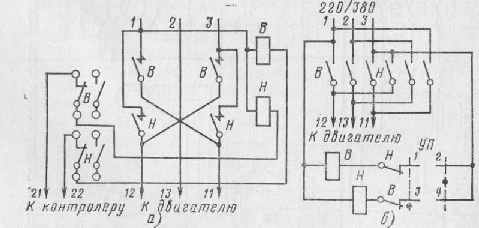
Рис. 2. Схема реверсирования. а — с помощью контакторной панели: б — с помощью магнитных пускателей.
Реверсивный магнитный пускатель состоит из двух трехполюсных пускателей, имеющих взаимную механическую и электрическую блокировку. При замыкании контактов универсального переключателя VII включается катушка В пускателя и соответствующими силовыми контактами В замыкаются линии 1-12, 2-13, 3-11. Двигатель вращается в одну сторону. При включении катушки Н замыкаются линии 1-11, 2-13, 3-12, что вызывает изменение порядка чередования фаз электродвигателя, поэтому он вращается в противоположную сторону.
Управление электроприводом. Как указывалось выше, для смягчения пусковых характеристик механизмов применяют пусковые резисторы.
Пусковыми резисторами управляют: – прямым способом, при котором цепи сопротивлений подключаются непосредственно к зажимам контроллера, установленного в кабине крана; – дистанционным способом, когда цепи резисторов включаются контакторами магнитной панели, управляемой с помощью командоконтроллера, установленного в кабине.
На рис. 3 приведена схема управления электроприводом крана прямым способом. На схеме показаны контроллер КМ типа ККТ-62А, два пусковых резистора ПС1 и ПС2 типа НФ-2А, два двигателя Ml и МЗ и два электрогидротолкателя тормоза М2, М4. На первой позиции контроллера обмотки роторов замыкаются на полный комплект сопротивлений, на второй позиции включаются контакты контроллера, часть резистора отключается. Двигатель переходит на более жесткую характеристику, его частота вращения возрастает и т. д. На пятой позиции контроллера все резисторы отключены, обмотки роторов замкнуты накоротко, двигатели работают на естественных характеристиках, где скорость достигает наибольшего значения.
В качестве примера дистанционного способа регулирования пуска электродвигателя с фазным ротором на рис. 4 приведена электрическая схема управления механизма передвижения. Управляют пуском электродвигателя и регулируют частоту вращения в этом случае с помощью контроллера КК типа ККТ-61А. Однако здесь контроллер работает в цепи управления как командоконтроллер, а пускорегулирующие резисторы коммутируют с помощью магнитного контроллера. При включении рубильника В напряжение через катушки реле максимального тока РТ1 и РТ2 подается к неподвижным контактам контакторов К1 и К2. На нулевой позиции ком андоконтроллера КК втягивающая катушка промежуточного реле Р1 получает питание по цепи: провод 010, замкнутые контакты КК, УП1, РТ1, РТ2, УП1, провод 037. Реле Р1 замыкает свои контакты в цепях 020-023 и 025-036.
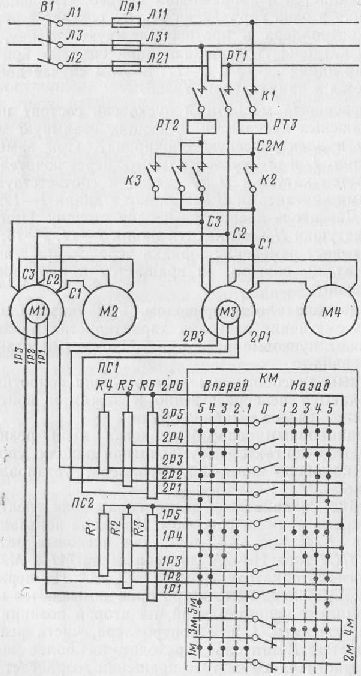
Рис. 3. Схема управления электроприводом крана прямым способом.
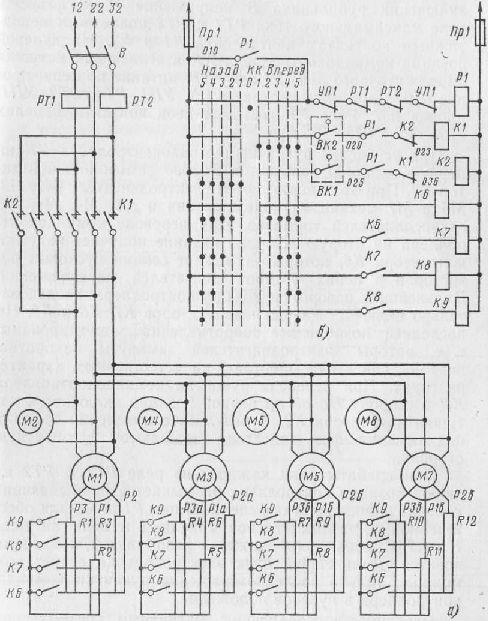
Рис. 4. Схема управления электроприводом дистанционным способом. а — силовая цепь; б — цепь управления.
При установке рукоятки командоконтроллера КК на первую позицию положения Вперед замыкается контактор К1 — При этом включаются электродвигатели Ml, МЗ, М5 и М7 механизма передвижения и М2, М4, Мб, М8 гидротолкателей тормозов. При переводе командоконтроллера на вторую позицию питание получает катушка контактора Кб, который замыкает секции пусковых резисторов в цепях роторов двигателей передвижения. Дальнейший поворот рукоятки контроллера последовательно включает катушки контакторов К7, К8 и К9. На последней позиции все сопротивления зашунтированы, т.е. роторы электродвигателей замкнуты накоротко, поэтому двигатели работают на естественных характеристиках. При переводе рукоятки командоконтроллера КК в сторону Назад на первой позиции включается катушка контактора К2. В результате изменения порядка подключения фаз двигатели вращаются в обратную сторону.
При срабатывании каждого из реле РТ1 и РТ2 на любой позиции контроллера размыкается размыкающий контакт одного из этих реле, катушка Р1 окажется обесточенной и разомкнет свои контакты в цепи катушек K1, К2. Силовая цепь окажется разомкнутой, кран остановится. Дальнейший пуск электропривода станет возможным только после возвращения рукоятки командоконтроллера в нулевое положение.
Особенности управления магнитным контроллером типа ТСАЗ-160. У магнитных контроллеров ТСА и КС первое и второе положения контроллера служат для спуска с пониженной скоростью грузов выше 50% от номинального. При этом на первом положении спуска возможна работа только с номинальным грузом. Для спуска тяжелых грузов на первом и втором положениях необходимо включить педаль НП. Тогда в первом положении включается реле 1РУ, 2РУ. Включатся при нажатой педали и контактор противовключения П, контактор В, контактор пуска КП, контактор тормоза Т и реле блокировки РБ.
При втором положении командоконтроллера контактор П противовключения отключается. На первом и втором положениях двигатель работает в режиме противовключения.
Груз массой, меньшей 50% номинального, на первом и втором положениях командоконтроллера опускаться не будет. Его опускание возможно только в третьем положении командоконтроллера. В третьем положении командоконтроллера включаются контакторы Н и О. Это вызывает включение двигателя в режим однофазного торможения. Контакторы Я и О включают реле блокировки РБ, которое включает контактор Т — механизм растормаживается. Цепь контакторов В и КП разорвана блок-контактами Я и О. В этом же положении последовательно включаются контакторы 1У, 2У. Контактор 2У разрывает цепь реле 1РУ, которое в свою очередь включает с выдержкой времени контакторы ЗУ и 4У, т.е. заворачиваются пусковые резисторы.
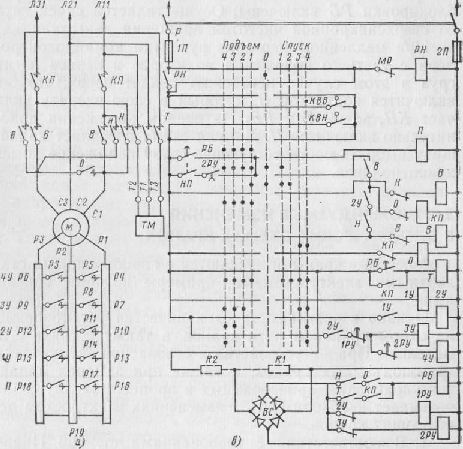
Рис. 5. Принципиальная схема электропривода подъема с магнитным контроллером ТСАЗ-160. а — силовая цепь; б — цепь управления; М двигатель; ТМ — тормозной магнит; Т — контактор тормозного магнита; КП- контактор пуска; В, Н- контакторы направления вращения двигателя; О — контактор однофазного торможения; П — контактор противовключения; 1У-4У- контакторы ускорения; MP — реле максимального тока; РБ — реле блокировочное; 1РУ, 2РУ — реле ускорения; КВВ, КВН — конечные выключатели; ВС — выпрямитель селеновый; R1-R2 — добавочные резисторы; НП — ножная педаль; Р — рубильник; 1П, 2П — предохранители.
В четвертом положении контроллера контактор О отключается. Контакторы ускорения 1У — 4У включены, все резисторы выведены. Контакторы Я, КП, Т и реле блокировки РБ включены. Осуществляется спуск груза со сверхсинхронной частотой вращения двигателя.
При медленном переводе рукоятки командоконтроллера с третьего положения во второе и первое легкий груз в этом случае неизбежно пойдет вверх, так как включится контактор В, который в свою очередь включает КП, затем Т и РБ. На первом положении дополнительно включится. Данная схема позволяет крановщику выбрать соответствующее грузу положение коман-доконтроллера.
Рекламные предложения:
Читать далее: Рекомендуемые изменения в электрических схемах кранов
Категория: — Электрическое оборудование
Главная → Справочник → Статьи → Форум
«Машинист мостового крана»

Электрическая схема мостового крана
Устройство мостового крана
Рассмотрим на примере мостового двухбалочного крана его устройство и основные компоненты которые в большей части можно и отнести и к однобалочным опорным и подвесным кранам
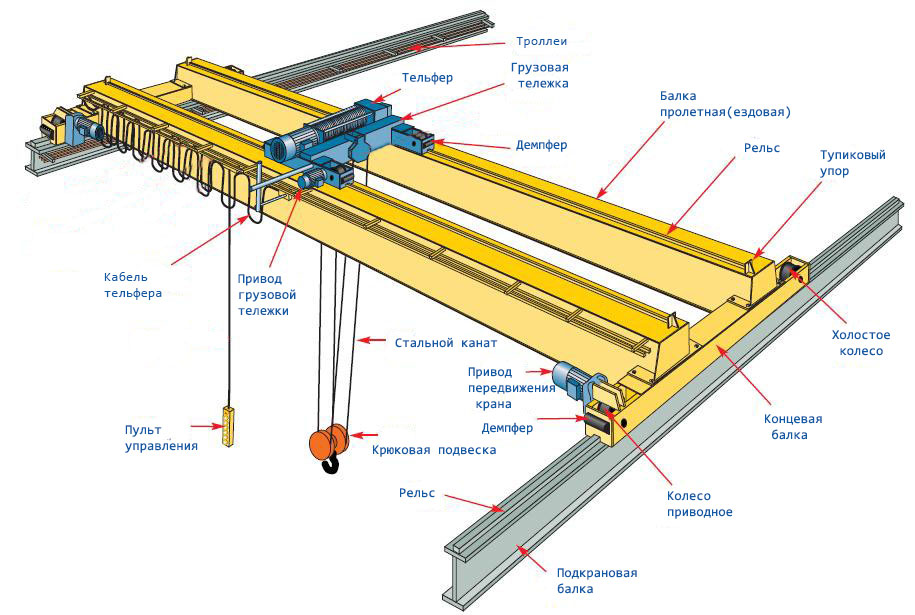
Балка пролетная(ездовая)- главная несущая конструкция крана предназначенная для передвижения грузовой тележки. В зависимости от типа крана и его грузоподъемности может иметь следующие основные конфигурации:
- Ездовая балка мостового крана коробчатого сечения представляет из себя металлоконструкцию сваренную из листового металла и имеет прямоугольный профиль.
- Мост трубчатого сечения с приваренным для усиления металлоконструкции двутавровой балкой.
- Пролетная балка из двутаврового сечения применяется только на кранах мостовых с облегченным режимом работы.
- Решетчатая конструкция пролетной балки
Концевая балка является опорным элементом пролетной балки и представляет собой жесткую сварную металлическую конструкцию чаще всего коробчатого сечения, с установленной на ней ходовой частью крана.
Металлическая конструкция концевой балки состоит из двух поясов, двух вертикальных стенок и диафрагм, размещенных внутри балки. Для установки ходовой части крана к концевым балкам приваривают посадочные платики с обработанными поверхностями, к которым при помощи болтов крепят буксы с ходовыми колесами. Соединение главных балок моста с концевыми осуществляют сваркой.
Грузовая тележка двухбалочных мостовых кранов представляет из себя сварную металлоконструкцию, посредством которой происходит перемещение груза вдоль пролетных балок, а также его подъема. На однобалочных мостовых кранах функцию грузовой тележки выполняет электрическая таль. В целом механизм передвижения грузовой тележки аналогичен механизму передвижения крана.
Привод передвижения крана представляет из себя механизм состоящий из мотор-редукторов приводящий в движение приводные колеса крана расположенные на концевых балках. Поскольку привод передвижения расположен на обоих концевых балках важной задачей обеспечения равномерности нагрузки является синхронность работы мотор-редукторов. Однако для малых пролетов возможно изготовление с одним центральным приводом.
Подкрановые рельсы мостовых кранов имеют другой профиль относительно железнодорожных и маркируются в зависимости от грузоподъемности и режима работы крана следующим образом: КР 70, КР80, КР100, КР120, КР140. Также в качестве рельса на передвижение грузовой тележки может выступать стальной квадрат если нагрузка на тележку не столь велика.
Крановые колеса на мостовых кранах могут иметь различные габариты и изготавливаются из стали 65Г с последующей закалкой поверхности катания. Приводными называют те колеса которые работают совместно с мотор-редукторами и обеспечивают передвижение крана вдоль цеха.
Крюковая подвеска включает блоки, которые вместе с верхними блоками на раме тележки и огибающим блоки канатом образуют полиспаст. На мостовых кранах для обеспечения при подъеме-опускании груза только его вертикального перемещения, создания равномерной нагрузки на опоры барабана и благоприятных условий для нагружения пролетной части моста применяют сдвоенные полиспасты, т. е. такие, при которых на барабан одновременно наматываются две ветви каната.
Обучение на тему «Эксплуатация и обслуживание кран-балки управляемой с пола»

Мостовой кран: конструкция, технические характеристики, назначение и применение
Кран мостового типа представляет собой кран с устройством для поднятия груза, который подвешен к электрической системе. Эта система перемещается по стальной конструкции, которая перемещается.
Виды и типы мостовых кранов
Мостовые краны бывают общего назначения, а так же специального. К кранам общего назначения относятся краны, которые для поднятия груза имеют крюк. К кранам специального назначения относят краны, которые имеют специальное захватывающее устройство.
Краны разделят по типу мостовой конструкции на:
- Опорный мостовой кран;
- Подвесной мостовой кран;
- Козловой мостовой кран.
Мост опорного крана опирается на рельсы. Опорный кран бывает: электрический однобалочный и двухбалочный, ручной однобалочный и двухбалочный, так же бывает электрический специальный (магнитный, грейферный).
Козловой мостовой кран расположен на двух балках, которые установлены на надземные рельсы. Подвесной мостовой кран прикрепляется на рельсовые опоры.
Подвесные краны бывают:
- Ручные однобалочные;
- Электрические однобалочные.
Каждый из трех типов кранов бывает с ручным приводом и электрическим приводом. Также краны различают по количеству груза, который они могут поднять. К первой группе относятся краны, которые могут поднять груз до пяти тонн (ссылка на статью о кране грузоподъемностью 5 тонн). Ко второй группе относятся краны общей грузоподъемностью от пяти до пятидесяти тонн. И последняя, третья группа – грузоподъемность свыше пятидесяти тонн.
Особенности кранов мостового типа
Крановый мост представляет собой две балки, которые прикреплены к основной. Балки представляют собой мелкие коробочки или кубики, имеют горизонтальный пояс (верхний и нижний), а также две вертикальные стенки. Края каждой рельсы укрепляются специальными опорами, это делается для того, чтобы ограничить движение моста в пределах тележки. Боковые площадки балок имеют специальные переходы, предназначенные для доступа к механизмам и конструкции крана рабочим. Это обеспечивает беспрепятственный ремонт, поврежденных деталей крана.
Кран мостового типа обязательно должен иметь несущую конструкцию, механизм для поднятия груза, а так же крюк, которым цепляют за груз и поднимают. Все вышеперечисленные механизмы приводятся в движение при помощи электрического привода.
В зависимости от того, где кран используется и какие-либо выполняет задачи, то мостовой кран должен быть:
- цеховым;
- строительным;
- транспортным;
- палубным.
Цеховой кран предназначен для погрузки и разгрузки грузов, находящихся на предприятии в специальных цехах. Он, как правило, располагается на всю длину цеха. Такие краны состоят из подъемочного моста и тележки. Существуют так же краны специальные, например, металлургические. Их используют в литейном производстве.
Кран-балка имеет основную балку, то есть мост, которая располагается над пролетом, а так же концевые балки. В состав конструкции кран-балки входит ходовая карета и механизм, предназначенный для подъема груза. Двухбалочный мостовой кран применяется в разгрузочно–погрузочных цехах, внутри и снаружи помещений. Однобалочный кран применяется для подъемных работ в зданиях и цехах в промышленности.
Каждый кран имеет механизмы для захвата груза различной формы, конструкции. Эти механизмы захваты так же имеют каждый свою функцию.
Крюковой механизм захвата снабжен крюками для погрузки и разгрузки одиночных грузов. Если нужно перегрузить сыпучие вещества используют специальные ковши. Как раз для перегрузки сыпучих веществ используется грейферный механизм.
Он представляет собой вид ковша, который открывается при помощи специального барабана. Магнитный – представляет собой крюк с магнитом и предназначен для перемещения грузов из железа. Очень универсальный и компактный механизм – магнитно-грейферный. Мульдовый – этот механизм имеет ящик, который используется для транспортировки измельченного металла. Кран – балка имеет специальные захватывающие лапы, которые захватывают мелкие грузы.